#Y2021 #TOF #专题
第一章中我们介绍了TOF的基本原理,应用,系统架构和分类。第二章和第三掌中,我们详细介绍了dTOF和iTOF系统,系统原理,从架构和零部件性能出发,分析重要的系统参数。本章,我们对iTOF系统和dTOF系统进行一个比较,同时介绍TOF的产业链,并且介绍一些应用。
---
# dTOF和iTOF比较
根据前两章的介绍,dTOF和iTOF的比较总结如下。
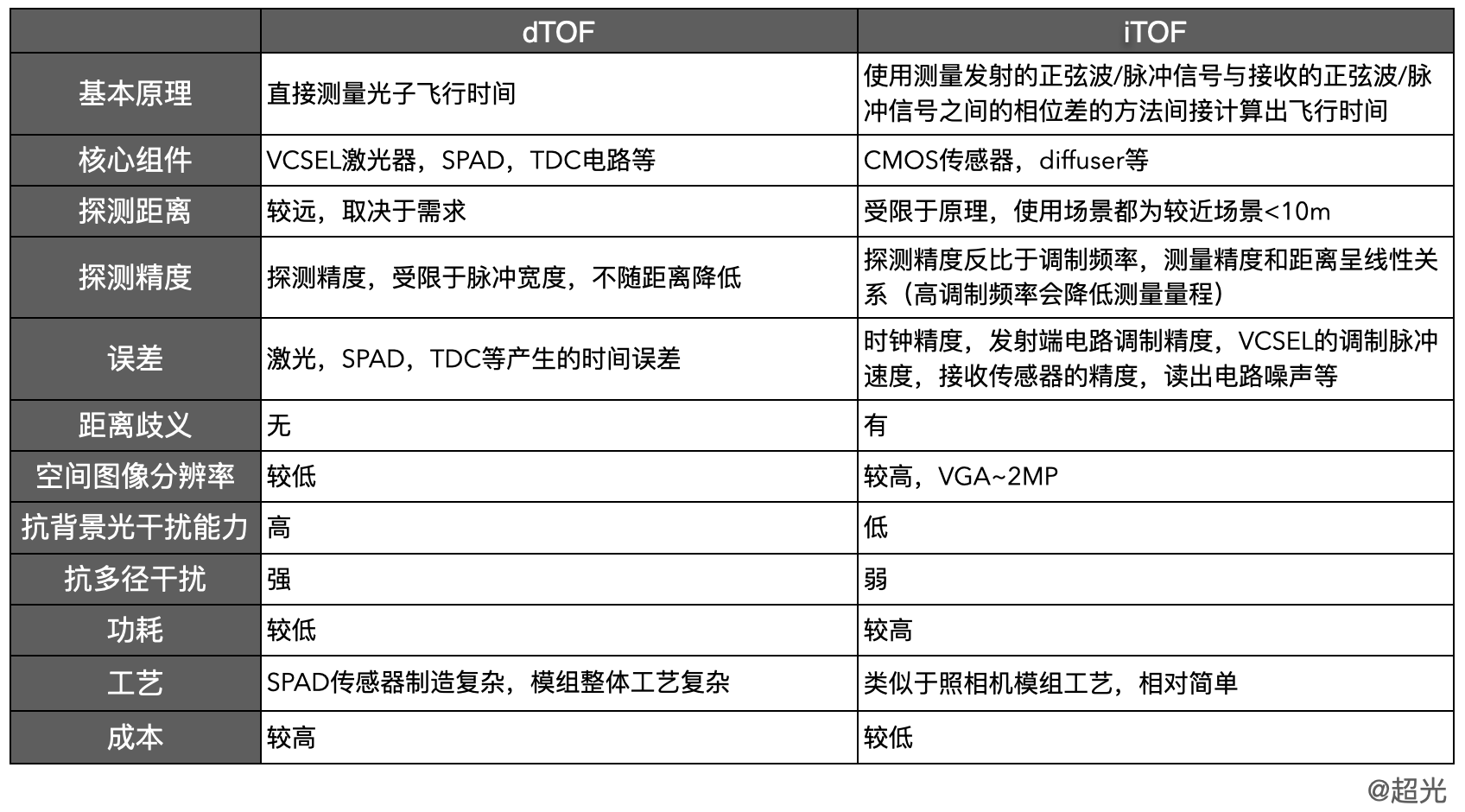
**基本原理:**两者都是去尝试获得飞行时间,dTOF是直接测量了飞行时间,而iTOF是通过相位差的方式间接得到这个信息。
**核心组件:**dTOF的核心组件是SPAD单光子雪崩传感器,而iTOF的核心元件是iTOF CIS传感器。根据基本原理和传感器的不同,两者使用不同的模拟数字混合电路及IC。
**探测距离和探测精度:**探测距离上,dTOF的探测距离可以较远,主要原因是其精度不随距离下降;而iTOF受限于原理,随着探测距离增加,探测精度随之下降。dTOF的贪色精度受限于脉冲宽度,而iTOF的探测精度反比于调制频率。
**误差:**TOF系统是测距系统,再深层一些,是使用光飞行时间进行距离的计算,其中重要的参数有光波的波长,飞行的时间。所有对于这两个参数会产生影响的器件都是误差产生的原因,比如激光波长偏移,SPAD,TDC的时间误差,时钟精度,读出噪声等等。
**距离歧义:**由于iTOF是通过相位计算飞行时间,相位是周期性变化的,所以会产生距离歧义。
**空间图像分辨率:**dTOF的SPAD制造技术依然pixel较大,filling factor较低,所以空间图像分辨率较低;iTOF的传感器基于CMOS sensor,可以做到较高的像素数量。
**抗干扰能力:**总体上讲,dTOF的抗干扰能力比iTOF强,由于其使用时间相关单光子计数法,所以可以通过统计方式去除干扰;iTOF容易收到各种干扰,需要使用各种算法去补偿和校正,这也是各种iTOF方案公司的主攻方向。
**功耗:**dTOF无论在发射端还是接收端功耗都比iTOF低。
**工艺:**dTOF主要的工艺难点在SPAD的获得和TDC电路的制造商,iTOF的工艺类似于传统手机内照相机系统工艺,相对简单。
**成本:**dTOF的成本主要集中在SPAD和电路上,iTOF成本相对低一些。
# 产业链
TOF的产业链总结如下图,其中特别列出了一些有代表性的中国企业。
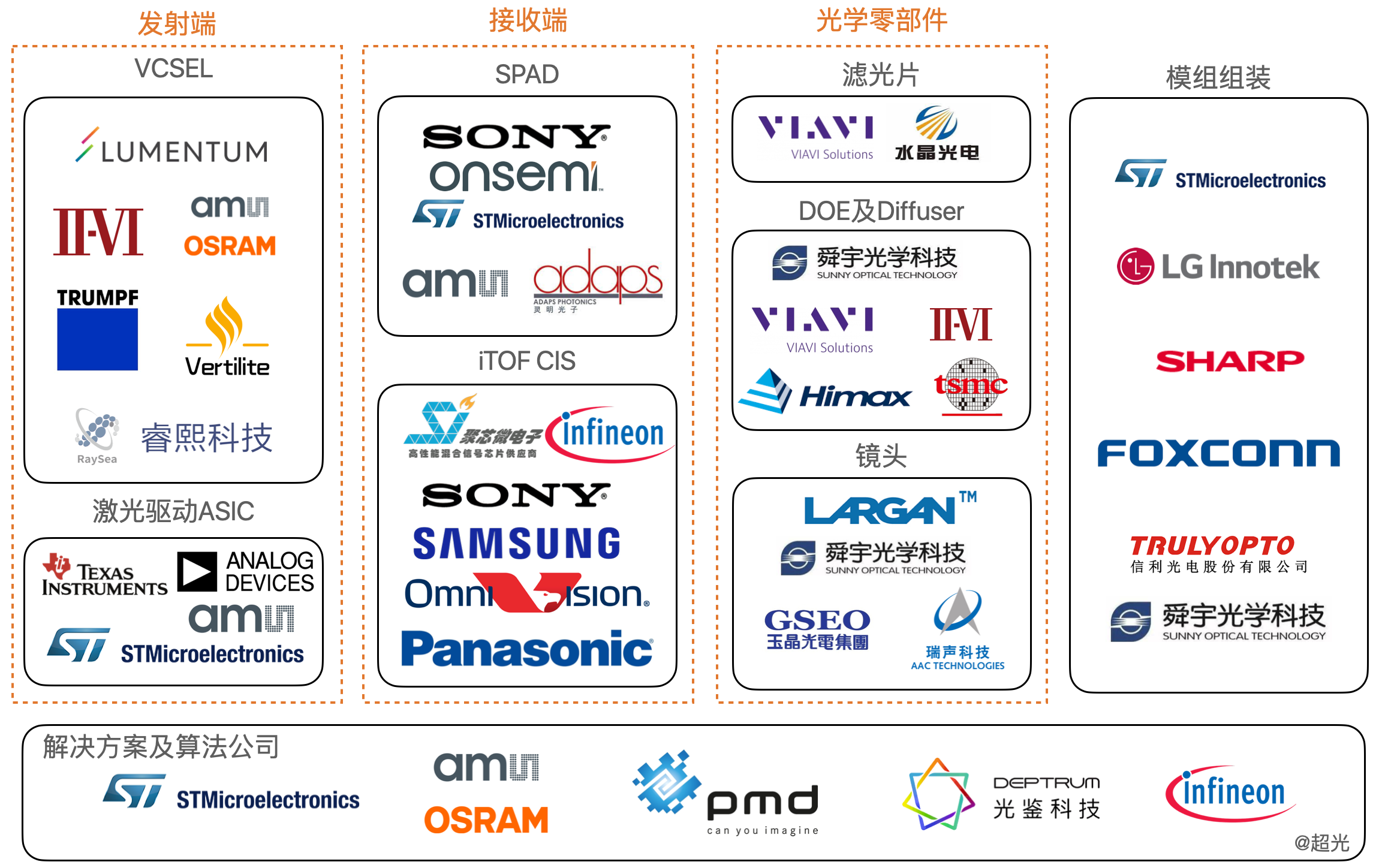
**VCSEL供应商:**VCSEL的供应商大部分最初来自于光通信领域,比如Lumentum和II-VI,今年II-VI收购了Coherent,Lumentum收购了NeoPhotonics,继续扩展业务;而AMS和OSRAM合并,强强联合;TRUMPF来自于飞利浦。国产代表初创公司有睿熙科技和纵慧激光。
**激光驱动ASIC:**激光器需要有一个专门IC进行驱动,该IC是数字模拟混合芯片,德州仪器,Analog,ST,AMS都可以提供该类芯片。
**SPAD传感器:**Sony依然是该行业老大,可以提供最高技术最多像素点的SPAD;ST,AMS可以提供64像素的SPAD传感器,主要用于临近传感或者辅助对焦应用;国内的创业公司灵明光子也在独立开发SPAD传感器。
**iTOF CIS传感器:**这种传感器制造方式类似于RGB CMOS,所以传统的CMOS厂商都有提供该种传感器的能力,国内的创业公司聚芯微电子也可以提供背照式iTOF CIS芯片。
**滤光片:**滤光片是TOF中的重要部件,Viavi和水晶光电是主要的供应商。
**DOE和diffuser:**苹果的dTOF方案使用DOE居多,其中台积电和Himax都可以提供DOE,diffuser的供应商有II-VI,舜宇光学,Viavi等。
**镜头:**光学镜头的供应商主要是舜宇光学,大立光学,玉晶光电和瑞声科技等。
**模组组装:**TOF的模组组装也是传统的模组组装厂,其中有ST,LG Innotek,Sharp,舜宇,信利等。
**解决方案和算法公司:**ST,AMS的官网都可以看到在售的TOF模组,pmd和infineon也为各个客户提供各种解决方案,国内的解决方案公司是光鉴科技。
可以看到TOF产业链已经非常完善,同时,在各个领域,国内都有光学企业占据了或者尝试占据生态位。但是国内企业对于一些核心零部件的掌握还不是很重复,比如VCSEL,激光驱动芯片,解决方案和算法,SPAD传感器等。但是对于镜头,滤光片,整体模组组装。
# 应用
对于TOF应用,苹果的FaceID刚出现的时候,带起了手机行业的3D识别风。经过这几年的沉淀,手机上后置TOF国内手机企业更多的是使用TOF进行辅助对焦,或者前置进行人脸识别,高级一些的有后置的体感交互,不过没有很好的应用,手机上的临近传感器也是TOF。
智能家居的TOF应用也越来越多,扫地机器人是一个很好的例子,新形态的机器人开始从扫地机器人发展而来,比如Amazon近期发布的家用机器人Astro。
对于工业自动化的自动避障,测量距离,定位,TOF的应用从以前专门的工业结局方案到现在的更多的集成化解决方案。
ToB业务种新零售也使用了很多TOF,比如手势识别,客流统计,行为识别,人脸识别等等。
不同场景的TOF的应用差别很大,从空间分辨率一个pixel就足矣的应用(比如小便池距离),到需要很高空间分辨率的应用(Lidar等);从要求快速响应的应用到慢一些也可以的应用;从需要低功耗的应用,到可以连接电源的高功耗可以接受的应用等等。
所以TOF的传感器设计要综合考虑应用,进行各种参数的平衡,其中包括精度,测量范围,响应速度,空间分辨率,成本,功率等等,并针对应用,进行整体的软硬件设计。
-----
版权声明: 感谢您的阅读,本文由[超光](https://faster-than-light.net/)版权所有。如若转载,请注明出处。